Supports RS485 or CAN communication control, and can also be easily and flexibly controlled through IO;
The driver encoder is synthesized into a closed-loop integrated design, which reduces the volume further;
The comprehensive torque feedback mode makes the electric claw intelligent and can be used offline;
The clamping force can be preset or changed online to meet various user needs;
Can monitor whether an object is clamped and provide feedback signals;
After clamping, the preset clamping force can be maintained continuously (similar to the characteristics of air claws), and if the clamped object falls out, an alarm signal will be output;
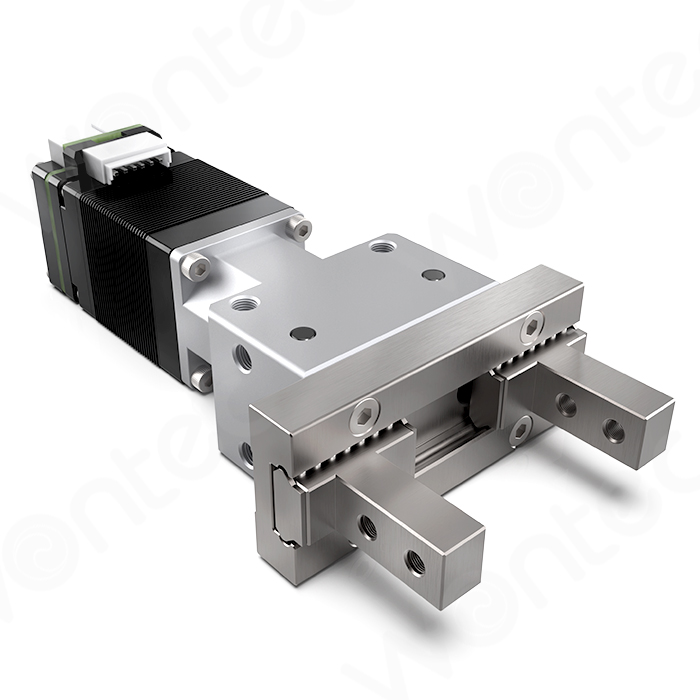
>>You can drag the area below to view the product model from all angles
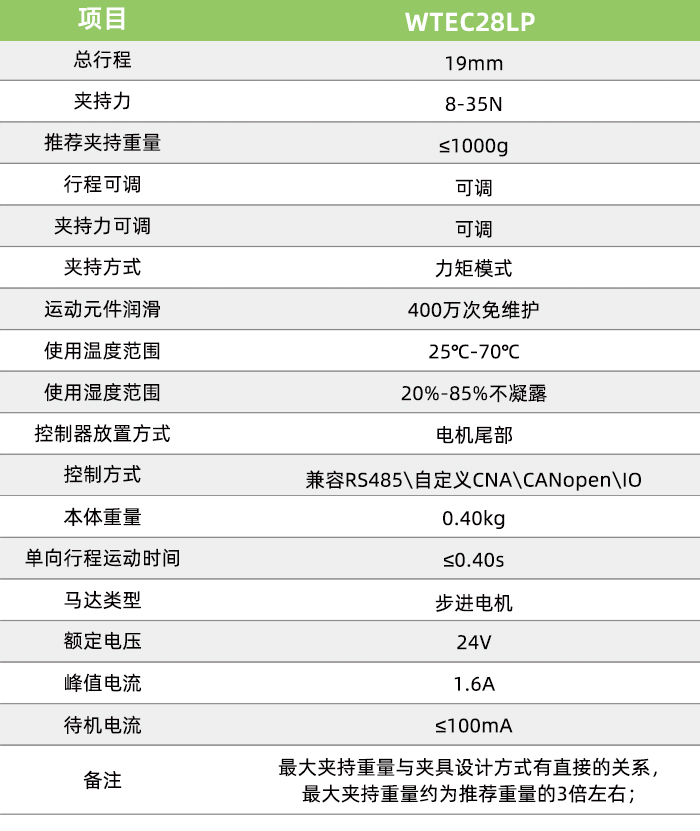
WTEC28LP performance parameters: